2600G光電吊艙

系統概述
1產品概述
2.6kg級三光載荷安裝在無人機平臺上,通過高清可見光攝像機、紅外熱像儀和激光測距機、框架中的慣性測量單元和圖像處理板等負載設備,實現目標監視、偵察、目標測距、圖像視軸穩定、典型目標自動識別、跟蹤、精準定位功能。
2功能指標
? 具備自檢功能;
? 具備高清可見光電視、紅外成像和激光測距功能;
? 高清可見光具備光學連續變焦、自動手動對焦、電子變倍、圖像增強等功能;
? 紅外熱成像具備手動調焦、電子變倍、圖像增強、極性轉換、非均勻校正等功能;
? 具備鎖定、慣性、掃描、自動目標識別、跟蹤功能;
? 具備目標測距、地理引導和對目標的精確定位功能;
? 具備實時反饋載荷角度、偵察信息及其他相關信息;
? 具備在線零位校準、零漂修正等功能。
3性能指標
3.1系統參數
? 重量:≤2.6kg;
? 尺寸:Φ184mm×220mm;
? 運動范圍:俯仰:20°~-100°,方位:360°;
? 工作電壓:DC24V;
? 平均功耗≤50W,峰值功耗:≤150W;
? 穩定精度:≤100urad;(1°/2hz的外部擾動);
? 跟蹤精度:≤500urad;(1°/2hz的外部擾動);
? 俯仰角精度:≤0.05°;
? 俯仰角精度:≤0.05°;
? 零位精度:≤0.1°。
3.2紅外熱像儀
? 探測器類型:紅外焦平面非制冷探測器;
? 探測器分辨率:640×512;
? 像元尺寸:12mm;
? 視場角:12.5°×10°;
? 鏡頭:50mm可調焦;
? 功能:圖像增強,背景校正,極性切換;
3.3可見光攝像機
? 探測器分辨率:1920×1080;
? 光學焦距:4.3mm~129mm,30倍連續變焦;
? 視頻圖像幀頻:≥30fps;
? 自動對焦時間:≤2s;
? 功能:圖像增強,透霧,自動增益;
3.4激光測距機
? 波長:1.54mm;
? 激光發散角:≤0.6mrad;
? 測距精度:≤±2m;
? 測距頻率:1Hz~10Hz;
? 測準率:≥98%
3.5視頻跟蹤板
? 跟蹤窗口位置:跟隨目標自動移動到視場的任何位置;
? 目標選取方式:人工鎖定;
? 小目標尺寸:3x3像素;
? 可跟蹤目標尺寸:可見光針對6m×4m的典型目標,自動識別距離≥3km,識別率≥90%,紅外針對6m×4m的典型目標,自動識別距離≥1km,識別率≥90%;
? 相機支持分辨率:1920x1080,30fps;
? 低信噪比:4;
? 跟蹤速度:≥80像素/幀;
? 啟動時間:≤10s;
? 小目標對比度:3%;
? 跟蹤板視頻輸出:網絡視頻及SDI。
3.6物理指標
? 外形尺寸(直徑×高):Φ184mm×220mm;
? 重量:≤2.6kg;
? 外觀顏色:天藍色。
3.7環境指標
? 工作溫度:-40℃~+60℃;
? 存儲溫度:-45℃~+65℃;
? 防水等級: IP66;
3.8功耗指標
? 輸入電壓:直流24V;
? 功耗:穩定功耗≤50W;峰值功耗≤150W
4系統組成
如圖1所示,光電球主要由紅外熱像儀、可見光攝像機和激光測距機組成,對外接口為21pin連接器。
附錄
1產品組成
光學艙位于轉臺的下部,光學艙外形呈“球形”。光電傳感器位于球體內部,主要由紅外熱像儀、可見光攝像機和激光測距機組成,透過光學窗口感知場景信息。整個光電傳感器隨動于伺服穩像平臺,實現瞄準線在方位、俯仰兩個方向上的運動。
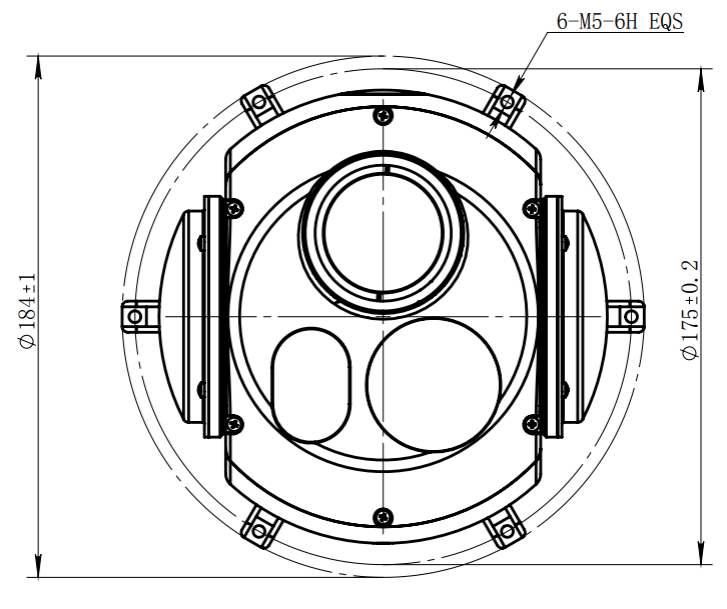
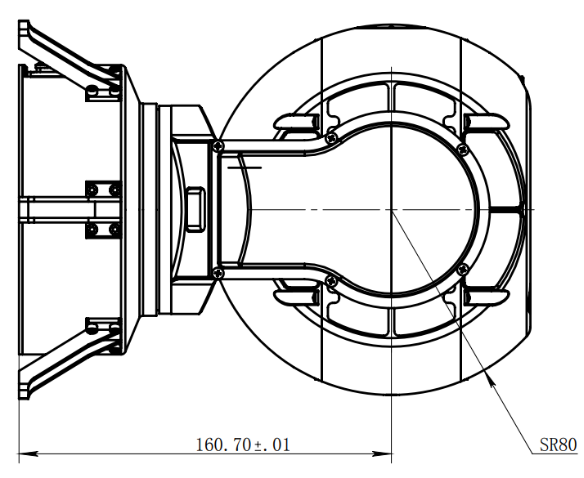
2外形尺寸
2.1光電吊艙外形尺寸

3光電吊艙對外視頻和通訊接口定義
3.1光電吊艙對外電源接口定義
系統對外接口選用J30J-21KWP7-J,對應連接器為:J30J-21TJL-30CM,連接器定義如下表。
引腳 | 定義 | 說明 |
1 | DC+24V | 電源輸入 |
2 | DC+24V | 電源輸入 |
3 | DC+24V | 電源輸入 |
4 | GND | 電源地 |
5 | GND | 電源地 |
6 | GND | 電源地 |
7 | 視頻網絡T+ | |
8 | 視頻網絡T- | |
9 | 視頻網絡R+ | |
10 | 視頻網絡R- | |
11 | TX+ | RS422發送+ |
12 | TX- | RS422發送- |
13 | RX+ | RS422接收+ |
14 | RX- | RS422接收- |
15 | RXD | RS232接收 |
16 | TXD | RS232發送 |
17 | GND | 信號GND |
18-21 | 空 | 備用 |
3.2網絡視頻碼流
視頻碼流
rtsp://192.168.0.105/live.sdp


